 Get in touch
Get in touch

1. Introduction : Déconstruction de la puissance des moteurs à induction à courant alternatif Le moteur à induction AC est l’un des m...
LIRE LA SUITENouvelles de l'industrie
2025-09-23
Les moteurs pas à pas représentent la pierre angulaire du contrôle de mouvement moderne, offrant un positionnement et une répétabilité précis sans avoir recours à des systèmes de rétroaction complexes. Ces moteurs électriques synchrones et sans balais convertissent les impulsions numériques en rotations d'arbre mécaniques précises, se déplaçant par étapes discrètes. Cette caractéristique les rend indispensables dans des applications allant de l’électronique gret public aux machines industrielles sophistiquées. Cependant, lorsque les applications exigent non seulement de la précision mais également une force importante pour déplacer de lourdes charges, surmonter les frottements ou maintenir une position sous contrainte, un moteur pas à pas standard peut s'avérer insuffisant. C'est là que la catégorie de moteurs pas à pas à couple élevé devient critique.
Dans le contexte des moteurs pas à pas, le « couple élevé » fait référence à la capacité du moteur à générer une force de rotation supérieure à celle des moteurs standard de taille physique ou de châssis similaire. Le couple est la mesure fondamentale de la force d’un moteur, dictant la charge qu’il peut accélérer, conduire et maintenir à l’arrêt. L'importance d'un couple élevé ne peut être surestimée dans les applications exigeantes. Par exemple, en robotique, un couple élevé est essentiel pour les actionneurs articulés qui doivent supporter le poids d’un bras robotique et sa charge utile. Dans l'usinage CNC, cela garantit que l'outil de coupe peut se déplacer avec précision à travers le matériau sans caler. Essentiellement, les moteurs pas à pas à couple élevé comblent le fossé entre le besoin d'une précision extrême et l'exigence d'une puissance mécanique substantielle , permettant l’innovation dans des domaines qui exigent les deux.
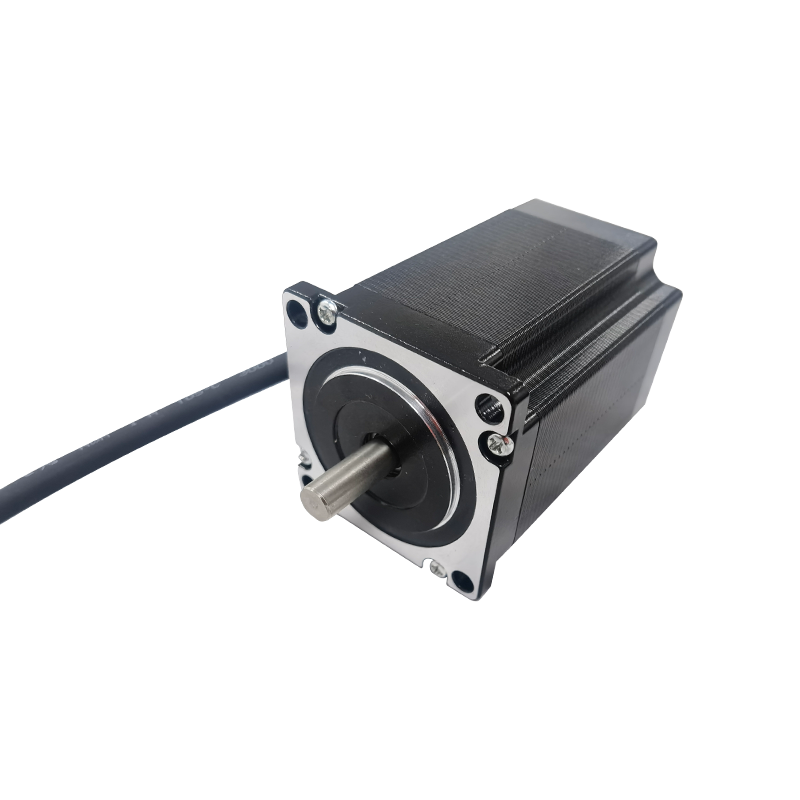
Pour apprécier pleinement les avantages des moteurs pas à pas à couple élevé, il faut d’abord comprendre les principes de base régissant tous les moteurs pas à pas. Contrairement aux moteurs à courant continu standard qui tournent en continu lorsqu'une tension est appliquée, un moteur pas à pas se déplace par incréments angulaires fixes appelés pas. La structure interne du moteur se compose d’une partie fixe (le stator) avec plusieurs bobines électromagnétiques et d’une partie rotative (le rotor) contenant généralement des aimants permanents ou un noyau magnétiquement perméable. En alimentant les bobines du stator dans une séquence spécifique, un champ magnétique est créé qui attire le rotor, le faisant s'aligner sur le champ et ainsi tourner d'un angle précis à chaque impulsion reçue d'un contrôleur.
Il existe plusieurs types fondamentaux de moteurs pas à pas, chacun ayant des caractéristiques opérationnelles distinctes. Moteurs pas à pas à aimant permanent (PM) comportent un rotor avec des aimants permanents, offrant un bon couple de maintien et un angle de pas relativement grand, mais ils offrent souvent une résolution et un couple inférieurs à ceux des autres types. Moteurs pas à pas à réluctance variable (VR) avoir un rotor en fer doux qui s'aligne avec le chemin du champ magnétique de moindre réluctance (résistance magnétique) ; ceux-ci sont moins courants aujourd’hui. Le type le plus répandu, en particulier dans les applications hautes performances, est le Moteur pas à pas hybride . Cette conception combine les principes des moteurs PM et VR, en utilisant un rotor à aimant permanent avec des dents qui interagissent avec le stator électromagnétique denté. Cette configuration hybride permet de très petits angles de pas, un couple élevé et une excellente précision de positionnement, ce qui en fait la conception dominante pour moteur pas à pas à couple élevé candidatures.
Plusieurs termes clés sont essentiels pour comprendre les spécifications des moteurs pas à pas. Le angle de pas définit la distance angulaire sur laquelle l'arbre tourne à chaque impulsion, généralement 1,8° (200 pas/tour) ou 0,9° (400 pas/tour) pour les moteurs hybrides. Couple de maintien est le couple maximum que le moteur peut exercer à l'arrêt avec ses enroulements sous tension, ce qui constitue une valeur critique pour un moteur pas à pas à couple élevé car il indique sa capacité à maintenir une position contre une force extérieure. A l'inverse, couple de détente est le couple présent lorsque les enroulements du moteur ne sont pas alimentés, provoqué par l'interaction magnétique entre le rotor à aimant permanent et le stator ; cela fournit une légère force de maintien passive.
En termes mécaniques, le couple est une mesure de la force de rotation appliquée à un objet. Pour un moteur pas à pas, il s’agit de la force de rotation que l’arbre du moteur peut générer pour provoquer ou résister au mouvement. C'est analogue au concept de force dans un système linéaire. Un couple élevé signifie donc la capacité d’un moteur à produire une forte force de rotation. Ceci est primordial pour les applications qui impliquent l’accélération de charges lourdes, l’entraînement de mécanismes à friction élevée ou le maintien d’un positionnement précis sous une pression externe constante. Il est important de distinguer qu'un moteur pas à pas à couple élevé n'est pas nécessairement une catégorie différente de moteur, mais plutôt une désignation pour les moteurs pas à pas conçus pour fournir des valeurs de couple nettement supérieures à la référence standard pour leur taille de châssis.
Le couple dans les moteurs pas à pas est généralement mesuré en Newton-mètres (N·m) ou en onces-pouces (oz-in). La spécification de couple la plus importante trouvée sur la fiche technique d'un moteur est la couple de maintien . Il s'agit du couple maximal que le moteur peut produire à l'arrêt lorsque ses bobines sont complètement alimentées. Il sert d’indicateur principal de la force du moteur. Une autre représentation cruciale est la courbe de couple , un graphique qui représente le couple disponible du moteur par rapport à sa vitesse de rotation. Cette courbe est vitale car le couple d’un moteur pas à pas diminue à mesure que sa vitesse augmente en raison des effets de l’inductance et de la force contre-électromotrice. Comprendre le vitesse du moteur pas à pas vs couple Cette relation est essentielle pour sélectionner un moteur qui fonctionnera de manière adéquate sur toute la plage de fonctionnement requise d'une application, garantissant qu'il ne cale pas à des vitesses plus élevées.
Le couple de sortie d'un moteur pas à pas n'est pas une valeur fixe ; il est influencé par plusieurs facteurs opérationnels et de conception. Le courant fourni aux enroulements du moteur est un moteur principal ; un courant plus élevé entraîne généralement un champ magnétique plus fort et donc un couple plus élevé, jusqu'aux limites de conception du moteur. La tension d'alimentation joue également un rôle crucial, en particulier à des vitesses plus élevées. Une tension plus élevée permet au courant de changer de direction plus rapidement dans les enroulements du moteur, aidant ainsi à maintenir le couple à des vitesses de rotation accrues. La conception physique du moteur, y compris la qualité de ses matériaux magnétiques, le nombre de dents du stator et l'entrefer entre le rotor et le stator, sont tous conçus pour maximiser la génération de couple. Par exemple, un Moteur pas à pas NEMA 23 à couple élevé sera conçu avec ces facteurs optimisés pour fournir plus de couple qu'un moteur NEMA 23 standard.
Le principal avantage de l'utilisation d'un moteur pas à pas à couple élevé C'est l'augmentation significative de la puissance mécanique disponible pour les tâches de contrôle de mouvement. Cette capacité améliorée se traduit par plusieurs avantages clés essentiels au succès des applications exigeantes. L’avantage le plus évident est la capacité à gérer des charges d’inertie plus importantes et à surmonter des frottements importants. Dans des systèmes tels que les routeurs CNC ou les bandes transporteuses automatisées, le moteur doit non seulement déplacer la tête d'outil ou la bande, mais également accélérer et décélérer rapidement la masse. Un moteur avec un couple insuffisant calerait ou perdrait des pas sous de telles demandes, alors qu'un moteur pas à pas à couple élevé fournit la force nécessaire pour garantir un fonctionnement fiable, élargissant ainsi la gamme d'applications possibles et améliorant la robustesse de celles existantes.
Précision améliorée et réduction significative des erreurs de position sont un autre avantage majeur. Le haut couple de maintien La caractéristique de ces moteurs leur permet de maintenir leur position de manière rigide contre des forces ou vibrations externes inattendues. Ceci est crucial dans des applications telles que l’assemblage de précision ou le positionnement de dispositifs médicaux, où même un écart infime peut entraîner une défaillance. De plus, la réserve de couple importante permet d'éviter le calage, cause fréquente de pas perdus. Des pas perdus se produisent lorsque le moteur ne parvient pas à exécuter un mouvement commandé, ce qui entraîne une erreur de position accumulée que le système en boucle ouverte ne peut pas détecter. En fonctionnant bien dans les limites de sa capacité de couple, un moteur pas à pas à couple élevé minimise considérablement ce risque, en garantissant que la position réelle de la machine correspond toujours à la position prévue commandée par le contrôleur.
Enfin, ces moteurs offrent une plus grande flexibilité de conception et une plus grande longévité. Les ingénieurs ne sont pas obligés de pousser un moteur jusqu’à ses limites opérationnelles, ce qui entraîne souvent une surchauffe et une durée de vie réduite. Au lieu de cela, ils peuvent sélectionner un moteur pas à pas à couple élevé qui fonctionne efficacement et froidement dans le cadre de son enveloppe de performance. Cette marge permet également aux systèmes de gérer plus facilement des charges variables ou des obstructions inattendues sans panne catastrophique. La possibilité d'utiliser un châssis moteur plus compact, tel qu'un Moteur pas à pas NEMA 23 à couple élevé , pour atteindre les performances qui pourraient autrement nécessiter un cadre plus grand et plus encombrant, est un avantage direct de cette technologie, permettant des conceptions mécaniques plus rationalisées et plus efficaces.
La combinaison unique de précision, de fiabilité et de puissance fait moteur pas à pas à couple élevés adapté à une vaste gamme d’applications dans de nombreux secteurs. Leur capacité à fournir un mouvement contrôlé par étapes discrètes sans capteurs de rétroaction simplifie la conception du système tout en garantissant la précision.
Dans le domaine de Robotique , ces moteurs sont les actionneurs de choix pour le mouvement des articulations, en particulier dans bras de robot qui doit supporter de lourdes charges utiles. Le moteur pas à pas à couple élevé for robotics fournit la force nécessaire pour articuler avec précision les membres et les pinces tout en supportant le poids du bras lui-même et de l'objet qu'il transporte. Ceci est essentiel pour des tâches allant de l’assemblage industriel et du soudage à l’automatisation complexe des laboratoires. Le couple de maintien garantit que le bras peut maintenir sa position sans dérive, même lorsqu'il est sous tension mais pas en mouvement.
Machines CNC représentent une application classique où la précision et la puissance ne sont pas négociables. Un moteur pas à pas pour routeur CNC les applications doivent déplacer l'outil de coupe à travers des matériaux comme le métal, le bois ou le plastique, rencontrant une résistance importante. Le moteur pas à pas à couple élevé garantit que le parcours d'outil est suivi avec précision sans calage, ce qui endommagerait la pièce et potentiellement endommagerait la machine. Les mêmes principes s'appliquent à d'autres équipements CNC tels que les tours, les découpeuses plasma et les découpeuses laser, où des performances constantes sont essentielles à la qualité et à la productivité.
Le monde de Impression 3D s'appuie fortement sur des moteurs pas à pas pour le mouvement des axes et l'extrusion du filament. À mesure que la taille et la vitesse des imprimantes augmentent et que les matériaux comme l'ABS et le nylon nécessitent plus de force pour passer à travers l'extrudeuse, la demande de couple augmente. Un moteur pas à pas pour imprimantes 3D couple élevé assure un alignement précis des couches en évitant les étapes manquées sur les axes X, Y et Z, tandis qu'un moteur d'extrudeuse à couple élevé fournit un flux de filament constant, conduisant à une qualité d'impression et une fiabilité supérieures.
Automatisation industrielle est un vaste domaine où ces moteurs sont omniprésents. Ils conduisent des systèmes de convoyeurs dans machines d'emballage , actionner les vannes et positionner les composants dans machines de sélection et de placement . Dans ces environnements, la durabilité et le fonctionnement continu sont primordiaux. L'utilisation d'un moteur pas à pas industriel à couple élevé garantit une fiabilité à long terme et la capacité d’effectuer des tâches répétitives avec une précision élevée des millions de fois. Pour les environnements difficiles, des options comme un Moteur pas à pas IP65 à couple élevé ou même un Moteur pas à pas extérieur classé IP67 sont disponibles pour résister à la pénétration de la poussière et de l’humidité.
Équipement médical exige les plus hauts niveaux de précision, de propreté et de fiabilité. Moteurs pas à pas à couple élevé sont utilisés dans des appareils tels que des analyseurs automatisés, des pompes à perfusion, des robots chirurgicaux et des équipements d'imagerie. Leur mouvement précis contrôle la manipulation des échantillons, l’administration du dosage et le positionnement des capteurs et des outils. Dans de nombreux cas, un moteur pas à pas à faible bruit pour l'automatisation de laboratoire ou un usage médical est spécifié pour garantir un environnement de fonctionnement silencieux. La nature prévisible du fonctionnement des moteurs pas à pas, combinée à un couple élevé, les rend idéaux pour ces applications sensibles.
Au-delà de celles-ci, des applications spécialisées émergent continuellement. Ils sont utilisés dans actionneurs automobiles pour le réglage des rétroviseurs et la commande des gaz, en machines à imprimer pour une alimentation papier précise et dans les systèmes d'énergie renouvelable tels que Couple élevé de moteur pas à pas de tracker solaire unités qui ajustent les panneaux pour suivre le soleil et dans contrôle du pas d'une éolienne mécanismes.
Sélection du approprié moteur pas à pas à couple élevé pour une application spécifique nécessite une évaluation systématique de plusieurs paramètres clés. Un mauvais choix peut entraîner de mauvaises performances, un calage du moteur, une surchauffe ou une panne prématurée.
L’étape la plus critique consiste à déterminer avec précision les exigences de couple de l’application. Cela implique de calculer le couple nécessaire pour accélérer l’inertie de la charge et vaincre les forces continues, telles que la friction ou la gravité. Le moteur doit fournir un couple supérieur au couple maximal requis par l'application sur toute la plage de vitesse de fonctionnement, telle que définie par le vitesse du moteur pas à pas vs couple courbe. Il est recommandé d'inclure une marge de sécurité de 30 à 50 % au-dessus de l'exigence calculée pour tenir compte des variables imprévues telles que les changements de friction ou les tolérances de fabrication. Consulter un tableau de couple du moteur pas à pas pour un moteur candidat, il est essentiel de vérifier que sa courbe de couple répond aux exigences de l’application à basse et haute vitesse.
La taille physique du moteur, souvent standardisée par NEMA tailles de châssis (par exemple, NEMA 17, NEMA 23, NEMA 34), fournit une indication générale de sa capacité de puissance. Un Moteur pas à pas NEMA 23 à couple élevé fournira généralement plus de couple qu'un moteur NEMA 17, tandis qu'un moteur pas à pas à grand châssis comme un NEMA 34 sera capable de couples de sortie encore plus élevés. Cependant, la taille du cadre à elle seule n’est pas un indicateur parfait ; la conception interne et la qualité des matériaux influencent grandement le couple réel. La sélection doit équilibrer les exigences de couple avec l'espace disponible et les contraintes de montage au sein de la machine.
Faire correspondre les spécifications électriques du moteur au pilote et à l’alimentation électrique est crucial pour atteindre les performances nominales. Le moteur note actuelle est le courant maximum par phase qu'il peut gérer sans surchauffe. Le conducteur doit être capable de délivrer ce courant. L'approvisionnement tension est tout aussi important. Une tension plus élevée permet au courant d'augmenter rapidement dans les enroulements du moteur, ce qui est nécessaire pour maintenir le couple à des vitesses plus élevées. Faire fonctionner un moteur avec une alimentation dont la tension est trop faible entraînera une chute rapide du couple à mesure que la vitesse augmente, un phénomène clairement visible sur la courbe de couple du moteur.
Le angle de pas détermine la résolution intrinsèque du moteur. Un moteur standard de 1,8° fournit 200 pas par tour, tandis qu'un moteur de 0,9° fournit 400 pas. Pour les applications nécessitant un contrôle de position très fin, un angle de pas plus petit ou l'utilisation d'un pilote capable de micropas est avantageux. Il est important de se rappeler que même si le micropas augmente la résolution, il n’augmente pas de manière significative la précision ; le couple produit dans une position de micropas est inférieur à celui produit dans une position de pas complet.
Le operating environment must be considered to ensure reliability. Factors such as ambient temperature, presence of contaminants like dust or moisture, and exposure to vibrations can impact motor selection. For example, in a wash-down environment or an outdoor application, an Moteur pas à pas IP65 à couple élevé ou plus serait nécessaire pour éviter les dommages. Des températures ambiantes élevées peuvent nécessiter un déclassement du moteur (en l'utilisant en dessous de sa spécification de couple maximum) pour éviter une surchauffe, ou la sélection d'un moteur avec une classe de température plus élevée.
Sélection d'un modèle spécifique parmi la vaste gamme de modèles disponibles moteur pas à pas à couple élevés peut être intimidant. L'aperçu suivant présente une gamme de produits classés en fonction de leurs points forts d'application typiques, mettant en évidence les fonctionnalités clés sans faire référence à des noms de marque spécifiques. Cette liste illustre la diversité offerte aux ingénieurs et aux concepteurs.
Moteur pas à pas NEMA 17 à couple élevé : Ce moteur compact est un outil performant dans les applications où l'espace est limité mais où les performances ne peuvent être compromises. Il est exceptionnellement populaire dans le haut de gamme impression 3D et l'automatisation à petite échelle. Les versions modernes offrent des valeurs de couple qui rivalisent avec les modèles plus grands et plus anciens, ce qui les rend idéales pour les instruments de précision et compacts. robotique articulations.
Moteur pas à pas NEMA 23 à couple élevé : Sans doute la taille de cadre la plus courante pour les applications de paillasse exigeantes, le Moteur pas à pas NEMA 23 à couple élevé offre un excellent équilibre entre taille, puissance et coût. C'est le choix incontournable pour Routeurs CNC , petites fraiseuses et plus grandes Imprimantes 3D . Sa polyvalence le rend adapté à un large éventail de automatisation industrielle tâches.
Moteur pas à pas NEMA 34 à couple élevé : Lorsqu'une puissance importante est requise, ce moteur pas à pas à grand châssis est la prochaine étape. Il est conçu pour les travaux lourds CNC machines, portiques industriels et systèmes d'automatisation qui doivent déplacer des charges importantes. Ces moteurs sont essentiels pour les applications où une force de poussée élevée est nécessaire, comme dans les applications grand format. machines d'impression .
Motoréducteur pas à pas : Ce type intègre un réducteur planétaire avec un standard moteur pas à pas hybride . La réduction de vitesse multiplie considérablement le couple de sortie tout en diminuant la vitesse de sortie, créant ainsi un moteur à faible régime et couple élevé . Ceci est idéal pour les applications telles que les entraînements de convoyeurs, les actionneurs de vannes et tout système nécessitant une force élevée à des vitesses lentes et contrôlées.
Moteur pas à pas étanche (IP65/IP67) : Conçu pour les environnements difficiles, un Moteur pas à pas IP65 à couple élevé est étanche à la poussière et protégé contre les jets d'eau, ce qui le rend adapté à la transformation des aliments et des boissons, machines d'emballage et les applications extérieures. Un Moteur pas à pas extérieur classé IP67 offre une protection encore plus grande contre l'immersion temporaire, parfaite pour traqueur solaire systèmes ou équipements agricoles.
Moteur pas à pas à couple élevé en boucle fermée : Ce système avancé combine un moteur pas à pas à couple élevé avec un encodeur intégré. L'encodeur fournit un retour en temps réel à un pilote spécialisé, créant ainsi un boucle fermée système capable de détecter et de corriger les étapes manquées. Cette technologie offre la simplicité d'un moteur pas à pas avec la fiabilité et les performances à grande vitesse d'un servo, idéal pour les applications critiques. équipement médical et à haut débit machines de sélection et de placement .
Moteur pas à pas à couple élevé avec encodeur et réducteur intégrés : Il s'agit d'une solution hautement technique qui regroupe un moteur, un réducteur pour la multiplication du couple et un codeur pour le retour de position dans une seule unité. Ceci moteur avec encodeur et réducteur intégrés simplifie la conception et l'installation pour les tâches de mouvement complexes, en fournissant un couple élevé, une faible vitesse et une assurance de contrôle dans un boîtier compact pour des applications telles que bras de robot and actionneurs automobiles .
Moteur pas à pas ultra-précis : Lese motors are engineered for applications requiring the utmost accuracy and smoothness, such as in dispositif médical automatisation de la fabrication ou du laboratoire. Ils présentent souvent des angles de pas très fins et sont optimisés pour un minimum de vibrations et de bruit, ce qui les qualifie de moteur pas à pas à faible bruit pour l'automatisation de laboratoire .
Moteur pas à pas certifié pour les industries réglementées : Les moteurs utilisés dans les équipements médicaux, aérospatiaux ou destinés au public nécessitent souvent des certifications formelles. Un moteur pas à pas avec certifications CE / UL / RoHS démontre la conformité aux normes internationales de sécurité, d’environnement et de compatibilité électromagnétique, ce qui est une condition préalable pour de nombreuses dispositif médical et les applications destinées aux consommateurs.
Moteur pas à pas hybride personnalisé à couple élevé : Pour les applications avec des contraintes mécaniques, électriques ou environnementales uniques, un moteur pas à pas hybride personnalisé à couple élevé c'est peut-être la seule solution. Les fournisseurs peuvent modifier les conceptions standard avec des tailles d'arbre , connecteurs, enroulements, revêtements ou matériaux magnétiques pour répondre exactement aux exigences de performances et de facteur de forme.
Atteindre la performance nominale d'un moteur pas à pas à couple élevé dépend entièrement de son couplage avec l’électronique d’entraînement appropriée. Le moteur lui-même est un appareil passif ; le pilote et l'alimentation déterminent l'efficacité avec laquelle il convertit l'énergie électrique en mouvement mécanique.
Pilotes de moteur pas à pas constituent le lien critique entre un signal de commande et le moteur. Ils prennent des impulsions de pas et de direction de faible puissance provenant d'un contrôleur de mouvement et les traduisent en courant de haute puissance nécessaire pour entraîner les enroulements du moteur. Pour moteur pas à pas à couple élevés , le choix de la technologie du pilote est primordial. Les pilotes de base fonctionnent en mode pas à pas ou demi-pas, ce qui peut être suffisant pour certaines applications mais entraîne souvent des vibrations notables. Pilotes micropas sont fortement recommandés. Ils divisent électroniquement chaque pas complet en micropas plus petits, ce qui entraîne un mouvement nettement plus fluide, une réduction du bruit audible et une stabilité améliorée à basse vitesse. La capacité d'un pilote à fournir un courant constant est essentielle pour maintenir le couple, en particulier à des vitesses plus élevées.
Alimentations doivent être sélectionnés avec soin. La tension d’alimentation doit être nettement supérieure à la tension nominale du moteur pour surmonter la force contre-électromotrice générée à grande vitesse. Une règle générale consiste à utiliser une tension d’alimentation 5 à 20 fois supérieure à la tension nominale du moteur, à condition que la tension nominale maximale du pilote ne soit pas dépassée. L'alimentation électrique doit également être capable de fournir le courant requis par le moteur. Le courant nominal (en ampères) de l'alimentation doit être au moins égal à la somme du courant requis par tous les moteurs entraînés, bien qu'une marge soit conseillée pour les demandes de pointe.
Signaux de contrôle sont les commandes numériques qui dictent le mouvement. La grande majorité des pilotes pas à pas modernes utilisent une interface simple à deux signaux : STEP et DIRECTION. Chaque impulsion sur la ligne STEP commande au moteur de se déplacer d'un incrément (un pas ou un micropas). La fréquence de ces impulsions détermine la vitesse du moteur. Le niveau (haut ou bas) sur la ligne DIRECTION détermine le sens de rotation. Cette simplicité fait du contrôle un moteur pas à pas à couple élevé simple pour les microcontrôleurs et les automates.
Câblage et connexions doivent être exécutés correctement pour garantir la fiabilité et éviter les dommages. L’utilisation de fils d’un calibre adéquat est essentielle pour gérer le courant du moteur sans chute de tension ni échauffement excessifs. Les connexions au pilote doivent être sécurisées et il est recommandé d'utiliser des câbles blindés pour les signaux STEP et DIRECTION afin de les protéger du bruit électrique, qui peut provoquer un comportement erratique du moteur. Une bonne mise à la terre du pilote, de l’alimentation et du châssis du moteur est également essentielle pour un fonctionnement stable.
Même avec un moteur pas à pas à couple élevé et le système d'entraînement, des problèmes peuvent survenir pendant le fonctionnement. Comprendre les causes profondes des problèmes courants est essentiel pour maintenir la fiabilité et les performances du système.
Moteur qui cale est l'un des problèmes les plus fréquents. Cela se produit lorsque le couple demandé par la charge dépasse le couple que le moteur peut produire à une vitesse donnée. La cause principale est une mauvaise adéquation entre les capacités du moteur et les exigences de l’application, souvent révélée par le vitesse du moteur pas à pas vs couple courbe. Le calage peut également être causé par une alimentation électrique insuffisante. Une alimentation sous-dimensionnée qui ne peut pas fournir une tension adéquate entraînera une chute rapide du couple à mesure que la vitesse augmente. De même, un pilote réglé sur une limite de courant inférieure à la valeur nominale du moteur empêchera le moteur de générer son couple complet. Les solutions incluent le recalcul des exigences de couple avec une marge de sécurité plus grande, la sélection d'un moteur avec une courbe de couple plus élevée, l'augmentation de la tension d'alimentation dans les limites du pilote ou la configuration correcte de la sortie courant du pilote.
Surchauffe C'est une caractéristique naturelle des moteurs pas à pas, car ils consomment du courant même à l'arrêt. Cependant, une chaleur excessive peut dégrader l'isolation et raccourcir la durée de vie. cycle de vie du moteur pas à pas . La cause la plus courante est le fonctionnement du moteur à son intensité nominale maximale ou à proximité pendant des périodes prolongées. L’utilisation d’un courant excessif pour obtenir un couple supérieur à celui pour lequel le moteur est conçu générera de la chaleur. D'autres causes incluent un taux de pas élevé à basse vitesse où la production de couple est élevée, ou un refroidissement inadéquat dans l'environnement d'application. Pour atténuer la surchauffe, assurez-vous que le courant du pilote est réglé de manière appropriée (souvent au courant nominal du moteur) et qu'il n'est pas inutilement élevé. Améliorer la circulation de l'air autour du moteur ou ajouter un dissipateur thermique peut être efficace. Pour les applications à service continu nécessitant un couple élevé, la sélection d'un moteur avec un couple nominal plus élevé que celui strictement nécessaire lui permettra de fonctionner à plus basse température.
Vibrations et bruit sont inhérents à la nature pas à pas discrète des moteurs pas à pas, mais ils peuvent devenir problématiques dans les applications de précision. Ces problèmes sont plus prononcés à basse vitesse et aux fréquences de résonance du moteur. Les vibrations peuvent entraîner une usure mécanique prématurée et réduire la précision du positionnement dans les systèmes sensibles. La première solution consiste à utiliser micropas pilotes, qui adoucissent le mouvement entre les pas complets, réduisant considérablement les vibrations et le bruit audible. Mécaniquement, s'assurer que le moteur est solidement monté et correctement couplé à la charge peut amortir les vibrations. Si la résonance à des vitesses spécifiques pose problème, le système de contrôle peut être programmé pour accélérer rapidement à ces vitesses plutôt que de fonctionner de manière constante en leur sein.
Positionnement inexact dans un système pas à pas en boucle ouverte indique presque toujours des pas perdus. Cela se produit lorsque le moteur ne parvient pas à se déplacer vers une position commandée parce que le couple de charge dépasse le couple moteur disponible. Le système n’est pas conscient de l’erreur, ce qui entraîne une dérive de position accumulée. La cause première est souvent un couple insuffisant, semblable à un calage. Cependant, cela peut également être causé par des chocs soudains ou des taux d’accélération excessifs qui exigent un couple instantané dépassant les capacités du moteur. Pour éviter toute imprécision, la sélection initiale du moteur doit être vérifiée par rapport à la courbe de couple. Pour les applications où les étapes manquées sont inacceptables, la solution la plus robuste consiste à passer à un moteur pas à pas à couple élevé en boucle fermée système. Ce système utilise un encodeur pour surveiller la position et corrigera automatiquement toute étape manquée, garantissant ainsi la précision d'un moteur pas à pas avec la fiabilité d'un servo.
Le field of moteur pas à pas à couple élevés n'est pas statique ; il évolue pour répondre aux exigences d’une automatisation et d’une ingénierie de précision de plus en plus sophistiquées. Plusieurs tendances clés façonnent leur développement futur.
Avancées dans les matériaux et la conception des moteurs conduisent à des améliorations continues de la densité de puissance. L'utilisation d'aimants permanents de qualité supérieure, tels que le néodyme, et d'aciers de stratification améliorés pour les noyaux du stator et du rotor, permet aux fabricants d'extraire plus de couple à partir d'une taille de châssis donnée. Cette tendance à la miniaturisation sans sacrifier les performances permet de concevoir des machines plus compactes et plus puissantes. La recherche sur de nouveaux matériaux magnétiques et sur des géométries électromagnétiques optimisées promet de nouveaux gains en termes d’efficacité et de couple.
Intégration avec des systèmes de contrôle avancés est une tendance dominante, largement motivée par l’adoption croissante de boucle fermée technologie. La distinction entre les systèmes pas à pas et les servomoteurs s'estompe à mesure que moteur pas à pas avec encodeur les solutions deviennent plus rentables et plus répandues. Les futurs pilotes disposeront d'algorithmes plus sophistiqués qui non seulement corrigent les erreurs de position, mais amortissent également activement les vibrations et optimisent la consommation de courant en temps réel en fonction de la charge. Ce contrôle intelligent maximise la couple moteur disponible tout en améliorant la douceur et l’efficacité.
Le demande croissante de moteurs à couple élevé et économes en énergie influence les priorités de conception. À l’heure où la durabilité devient une préoccupation majeure en matière d’ingénierie, des efforts sont déployés pour réduire la consommation d’énergie inhérente aux moteurs pas à pas, qui consomment généralement le plein courant même à l’arrêt. De nouvelles technologies de pilote apparaissent qui peuvent réduire dynamiquement le courant du moteur lorsqu'il est plein couple de maintien n'est pas nécessaire, ce qui réduit considérablement la consommation d'énergie et la génération de chaleur sans compromettre les performances. Ceci est particulièrement important pour les applications fonctionnant sur batterie et les installations industrielles à grande échelle où les coûts énergétiques sont importants.
Moteurs pas à pas à couple élevé constituent une technologie critique pour un vaste éventail d'applications modernes qui exigent une combinaison de contrôle de position précis et d'une force mécanique substantielle. Des articulations de bras de robot aux puissants moteurs de Routeurs CNC et les actionneurs fiables de équipement médical , ces moteurs offrent une solution unique qui équilibre performances, simplicité et rentabilité.
Le effective selection and use of a moteur pas à pas à couple élevé dépendent d’une compréhension approfondie des exigences de l’application, en particulier du couple nécessaire sur toute la plage de vitesse de fonctionnement. Il est essentiel de prendre soigneusement en compte des facteurs tels que la taille du moteur, les spécifications électriques et les conditions environnementales. De plus, il est impossible d'obtenir des performances optimales sans associer le moteur à un pilote et une alimentation correctement adaptés.
1. Introduction : Déconstruction de la puissance des moteurs à induction à courant alternatif Le moteur à induction AC est l’un des m...
LIRE LA SUITE1. Introduction Dans l'automatisation industrielle moderne, la construction de centres de données, la mise à niveau de l'électronique grand public...
LIRE LA SUITELes moteurs pas à pas représentent la pierre angulaire du contrôle de mouvement moderne, offrant un positionnement et un re...
LIRE LA SUITELe paysage automobile industriel subit une transformation importante, entraînée par l'incessante...
LIRE LA SUITEProduits connexes
Bâtiment 10, n°199, Jinfeng Road, Suzhou High-tech, province du Jiangsu, Chine
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Droit d'auteur © Suzhou Retek Electric Technology Co., Ltd. Tous droits réservés. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers



 - Moteur UAV de levage lourd haute puissance")









