 Get in touch
Get in touch

1. Introduction : Déconstruction de la puissance des moteurs à induction à courant alternatif Le moteur à induction AC est l’un des m...
LIRE LA SUITENouvelles de l'industrie
2026-04-21
Un moteur à courant continu (courant continu) convertit l'énergie électrique en rotation mécanique en utilisant l'interaction entre un champ magnétique et un conducteur porteur de courant. Le principe de fonctionnement découle de la loi de force de Lorentz : lorsqu'un courant électrique traverse un conducteur placé à l'intérieur d'un champ magnétique, le conducteur subit une force perpendiculaire à la fois à la direction du courant et à la direction du champ. Disposez suffisamment de conducteurs porteurs de courant dans un assemblage rotatif et cette force devient un couple de rotation continu.
Concrètement, un moteur à courant continu contient deux systèmes magnétiques fondamentaux. Le stator fournit un champ magnétique stationnaire, provenant soit d'aimants permanents, soit d'électro-aimants (enroulements de champ). Le rotor (également appelé induit) transporte des conducteurs connectés à une alimentation CC externe. Le courant circulant dans les conducteurs du rotor réagit avec le champ du stator pour générer un couple, faisant tourner le rotor. Tant que la tension continue est appliquée, le moteur continue de tourner.
La vitesse d'un moteur à courant continu est principalement contrôlée par la tension appliquée : une tension plus élevée produit une rotation plus rapide. Le couple de sortie est proportionnel au courant d'induit. Cette relation simple entre tension, courant, vitesse et couple rend les moteurs à courant continu exceptionnellement faciles à contrôler sur une large plage de fonctionnement — une propriété qui explique leur domination continue dans les applications d'entraînement à vitesse variable.
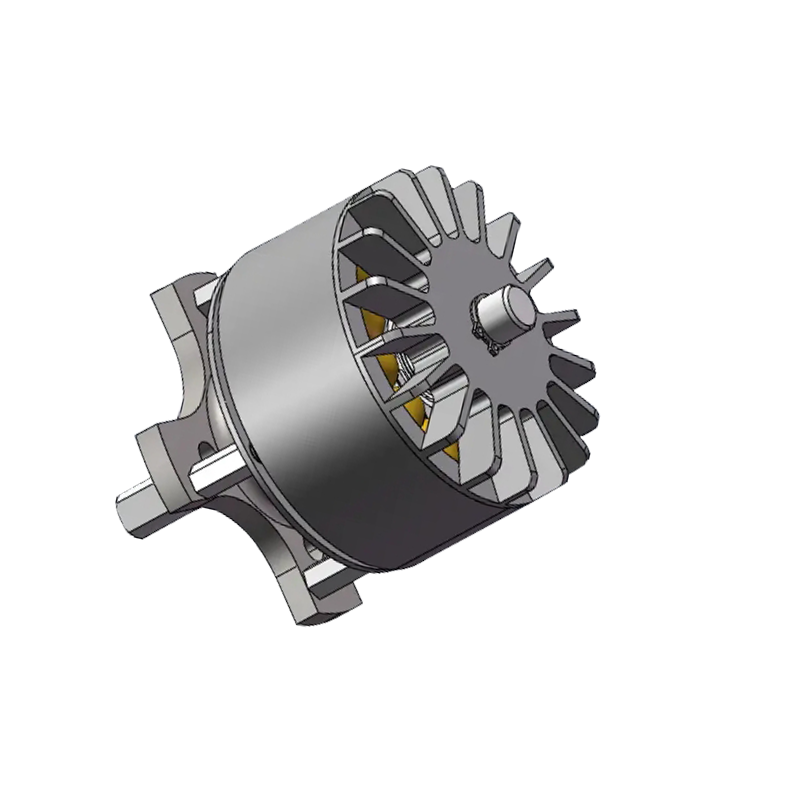
L'architecture interne d'un moteur à courant continu varie entre les conceptions avec et sans balais, mais plusieurs composants essentiels sont communs aux deux types.
Le stator est l’ensemble extérieur fixe du moteur. Dans les moteurs à courant continu de petite puissance et de puissance fractionnaire, le champ statorique est produit par des aimants permanents fixés à l'alésage intérieur du carter du moteur. Dans les moteurs à courant continu industriels plus grands, le stator porte des enroulements de champ – des bobines de fil enroulées autour de pièces polaires – à travers lesquelles circule un courant d’excitation continu séparé pour créer le champ magnétique. Le cadre du stator est généralement en acier au silicium laminé pour minimiser les pertes par courants de Foucault.
Le rotor est l'ensemble tournant monté sur l'arbre du moteur. Il se compose d'un noyau de fer laminé avec des fentes usinées autour de sa circonférence, dans lesquelles sont enroulés les enroulements d'induit. La construction laminée réduit les pertes par courants de Foucault dans le fer. Dans les moteurs à courant continu à balais, le rotor porte les bobines enroulées ; dans les moteurs à courant continu sans balais, le rotor porte les aimants permanents à la place.
Le collecteur est un anneau de cuivre segmenté monté sur l'arbre du rotor. Chaque segment se connecte à une bobine d'induit différente. Les balais de charbon (contacts à ressort montés dans le boîtier du stator) s'appuient contre la surface du collecteur et maintiennent le contact électrique pendant la rotation de l'arbre. Lorsque le rotor tourne, les segments du collecteur passent sous les balais en séquence, changeant automatiquement le sens du courant dans chaque bobine au bon moment pour maintenir le couple agissant dans un sens de rotation constant. Cette commutation mécanique est ce qui définit un moteur à courant continu à balais.
Les enroulements d'induit sont des conducteurs en cuivre isolés enroulés dans les fentes du rotor. La configuration de l'enroulement (tour, vague ou simplex) détermine le nombre de chemins de courant parallèles à travers l'induit et affecte les caractéristiques vitesse-couple du moteur. Les enroulements de champ sur le stator, lorsqu'ils sont présents, sont enroulés pour produire le nombre correct de pôles magnétiques pour la plage de vitesse et de couple de conception.
L'arbre de sortie transmet le couple mécanique à la charge. Des roulements à billes ou des paliers lisses de précision soutiennent l'arbre à chaque extrémité du boîtier, maintenant l'entrefer entre le rotor et le stator dans des tolérances serrées. Le boîtier (cloches d'extrémité et cadre) fournit un support structurel, protège les composants internes et, dans certaines conceptions, intègre des ailettes de refroidissement ou des dispositions de montage pour un ventilateur externe.
Dans un moteur à courant continu avec balais, le collecteur et les balais remplissent mécaniquement la fonction de commutation de courant. Lorsque l'induit tourne, les segments du collecteur passent devant les contacts des balais fixes, connectant chaque bobine d'induit à l'alimentation en séquence. Cela garantit que quelle que soit la position du rotor, la bobine actuellement alignée avec l'espacement des pôles du stator transporte toujours le courant dans la bonne direction pour produire un couple vers l'avant.
Le résultat est un moteur qui fonctionne directement à partir d’une alimentation CC sans aucune commutation électronique externe requise. Connectez un moteur CC à balais à une batterie ou à une alimentation CC régulée et il tourne immédiatement. Inversez la polarité et cela inverse la direction. Cette simplicité est la principale raison pour laquelle les moteurs à balais restent largement utilisés dans les applications sensibles aux coûts et de complexité faible à moyenne.
Le contact mécanique entre les balais et le collecteur introduit les principales limitations du moteur. La friction des balais et du collecteur génère de la chaleur et des débris d'usure, et l'arc électrique qui se produit lors de la commutation des segments produit des interférences électromagnétiques (EMI). Le remplacement des brosses est généralement requis toutes les 1 000 à 5 000 heures de fonctionnement en fonction de la charge actuelle, de la vitesse et de l'environnement d'exploitation. La surface du collecteur nécessite également une inspection et un resurfaçage périodiques.
Les moteurs à courant continu à balais ne conviennent pas à une utilisation dans des atmosphères inflammables ou explosives, car les arcs à balais peuvent enflammer les gaz environnants. Ils sont également limités en vitesse maximale par les contraintes mécaniques du contact balais-collecteur, généralement plafonnés à 3 000 à 8 000 tr/min dans la plupart des conceptions.

Un moteur à courant continu sans balais (BLDC) élimine entièrement l'ensemble collecteur et balais en déplaçant les aimants permanents vers le rotor et les enroulements vers le stator. La commutation de courant (commutation) est gérée électroniquement par un contrôleur de moteur qui surveille la position du rotor via des capteurs à effet Hall ou une détection de contre-EMF et alimente les bobines du stator dans le bon ordre pour maintenir la rotation.
Cette inversion architecturale a des conséquences importantes sur les performances, la maintenance et la gamme d'applications.
| Caractéristique | Moteur à courant continu brossé | Moteur CC sans balais |
|---|---|---|
| Méthode de commutation | Mécanique (commutateur de balais) | Électronique (capteurs du contrôleur) |
| Efficacité | 75 à 85 % | 85 à 95 % |
| Entretien | Remplacement régulier de la brosse requis | Minime – roulements uniquement |
| Plage de vitesse | Jusqu'à ~ 8 000 tr/min typique | Jusqu'à 100 000 tr/min possibles |
| EMI / arc | Arc de brosse important | Faible (pas de contact avec la brosse) |
| Adéquation aux environnements dangereux | Ne convient pas (arc de brosse) | Convient (pas d'arc) |
| Exigence du contrôleur | Contrôle simple de la tension CC | Contrôleur électronique dédié requis |
| Coût unitaire | Inférieur | Supérieur (contrôleur de moteur) |
| Durée de vie | Limité par l'usure des brosses | Plus longtemps — pas de pièces de contact d'usure |
L'avantage en termes d'efficacité des moteurs sans balais est particulièrement important dans les applications alimentées par batterie. Une transmission de véhicule électrique ou un outil électrique faisant fonctionner un moteur BLDC à 92 % d'efficacité par rapport à un équivalent à balais à 80 % se traduit directement par une durée de fonctionnement plus longue par charge et une charge thermique réduite sur la batterie. Il s’agit du principal moteur du passage quasi universel aux moteurs sans balais dans les outils électriques sans fil, les véhicules électriques, les drones et les systèmes CVC au cours des deux dernières décennies.
Malgré les avantages en termes de performances des conceptions sans balais, les moteurs à courant continu avec balais restent le bon choix dans plusieurs catégories d'applications.
Un variateur de moteur à courant continu (également appelé variateur CC ou contrôleur CC) est le boîtier électronique de puissance qui régule la tension et le courant fournis à un moteur à courant continu pour contrôler sa vitesse, son couple, son accélération et sa direction. Le moteur et le variateur forment ensemble un système de contrôle de mouvement complet : le moteur fournit une sortie mécanique et le variateur gère l'entrée électrique pour obtenir le profil de mouvement souhaité.
Les variateurs CC à balais traditionnels utilisent des techniques de contrôle de phase à thyristors (SCR) ou PWM (modulation de largeur d'impulsion) pour réguler la tension d'induit. Un entraînement à quatre quadrants peut contrôler la vitesse et le couple dans les deux sens de rotation, permettant un freinage par récupération – où le moteur agit comme un générateur pendant la décélération, renvoyant de l'énergie au bus d'alimentation. Cette capacité est largement utilisée dans les applications industrielles telles que les bobineuses, les laminoirs et les palans où la décélération contrôlée et la récupération d'énergie sont importantes.
La précision de régulation de vitesse d'un variateur CC à balais en boucle fermée avec un signal de retour tachymétrique est généralement ±0,1 % de la vitesse réglée , ce qui explique leur longue domination dans le contrôle de mouvement industriel de précision avant l'arrivée des variateurs de fréquence AC dans les années 1990.
Un contrôleur de moteur BLDC effectue une commutation électronique en lisant la position du rotor – via des capteurs à effet Hall intégrés dans le moteur ou via une estimation de la force électromagnétique sans capteur – et en commutant le courant à travers les phases du stator dans l'ordre correct. Le contrôleur gère également le cycle de service PWM pour réguler la vitesse et surveille le courant pour limiter le couple. Les entraînements BLDC plus sophistiqués mettent en œuvre un contrôle orienté champ (FOC), qui optimise l'angle entre le champ du stator et l'aimant du rotor pour un couple maximal par ampère sur toute la plage de vitesse.
Dans les systèmes de mouvement intégrés, tels que les articulations de robots, les axes servo et les broches CNC, le moteur BLDC et son entraînement sont généralement appariés et réglés pour former un ensemble assorti. Les paramètres du variateur, notamment la bande passante de la boucle de courant, le gain de la boucle de vitesse et le timing de commutation, sont configurés lors de la mise en service et stockés dans la mémoire non volatile du variateur.
Le paysage des applications pour les moteurs à courant continu avec et sans balais reflète leurs atouts respectifs en termes de coût, de maintenance, de plage de vitesse et de précision de contrôle.
1. Introduction : Déconstruction de la puissance des moteurs à induction à courant alternatif Le moteur à induction AC est l’un des m...
LIRE LA SUITE1. Introduction Dans l'automatisation industrielle moderne, la construction de centres de données, la mise à niveau de l'électronique grand public...
LIRE LA SUITELes moteurs pas à pas représentent la pierre angulaire du contrôle de mouvement moderne, offrant un positionnement et un re...
LIRE LA SUITELe paysage automobile industriel subit une transformation importante, entraînée par l'incessante...
LIRE LA SUITEProduits connexes
Bâtiment 10, n°199, Jinfeng Road, Suzhou High-tech, province du Jiangsu, Chine
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Droit d'auteur © Suzhou Retek Electric Technology Co., Ltd. Tous droits réservés. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers




 - Poussée de 4 kg")







